Knit Haptic Pneumatic Sleeve
A collaboration with the Self-Assembly Lab
2023
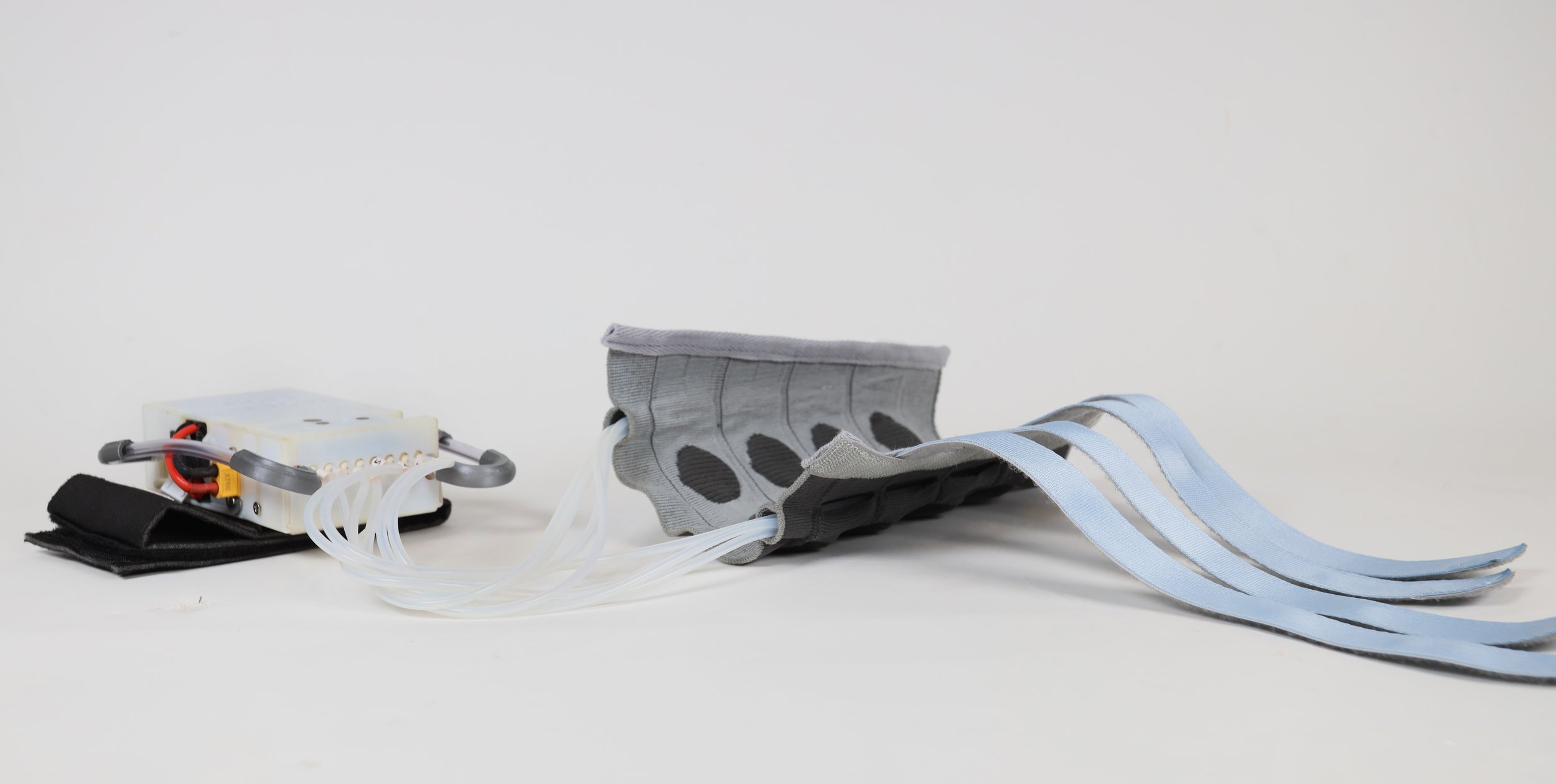
Working with the Self-Assembly Lab at MIT, we combined soft printed pneumatic actuators and variable stiffness knitting. Soft robots and actuators lose a lot of their force through isometric inflation, so we used a knit sleeve to isolate and focus the force in a single direction. We showed that using this new design paradigm allowed us to reach forces up to 40N for a single actuator, way above the threshold of 10N necessary for haptic feedback.
We implemented this strategy in designing a sleeve for social touch, that could transmit a series of signals ranging from single pokes, to brushes, to complex emotions such as happiness, attention, or love. We showed through a human subject study that those could be recognized with a level of certainty far above chance.
This project highlights the potential of knitted materials for wearable devices, leveraging their active ability to adjust material properties and their inherent comfort as a passive benefit.
The actuators are printed using the same RLP platform as the soft robotic arm earlier in my work. The sleeve is knitted on a Stoll CMS 330.