Soft Robotic Toolkit
2018
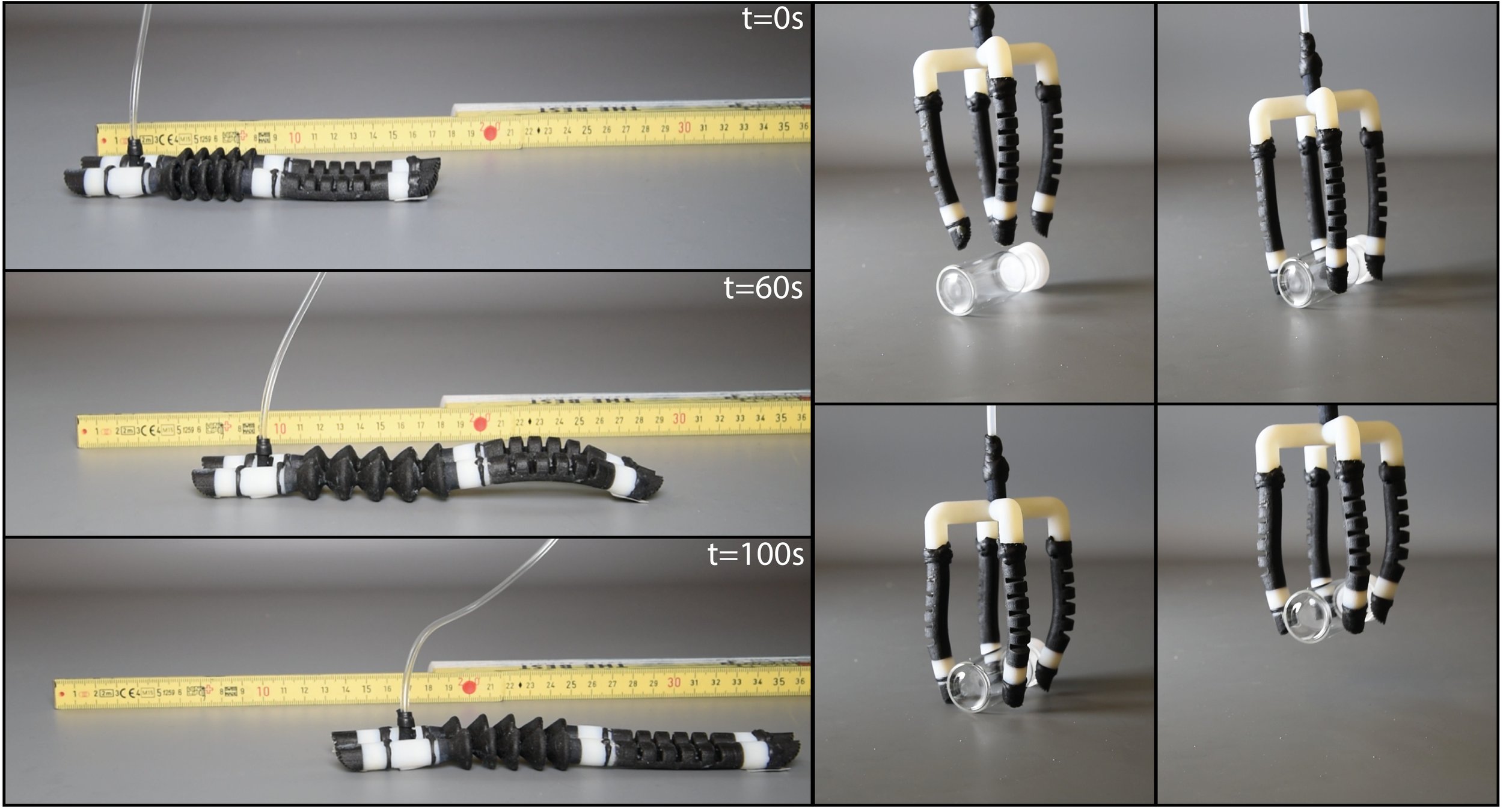
As part of my Master thesis, I developed a Soft Robotic toolkit. The toolkit consists of linear and bending pneumatic actuators and several connectors. The user can build a whole range of soft robots using the same elements: a crawler, a gripper, structural elements.
The parts were designed and simulated using FEA to avoid rupture and ensure optimal deformation behavior. They were all 3D printed using a Stratasys Connex500 using a combination of their VeroWhite and AgilusBlack materials.