Soft Robotic Arm
A collaboration with the Self-Assembly Lab
2018-2020
Working with the Self-Assembly Lab at MIT, we refined a silicone 3D printing process, rapid liquid printing (RLP), which has since then been spun off into the startup RLP Co.
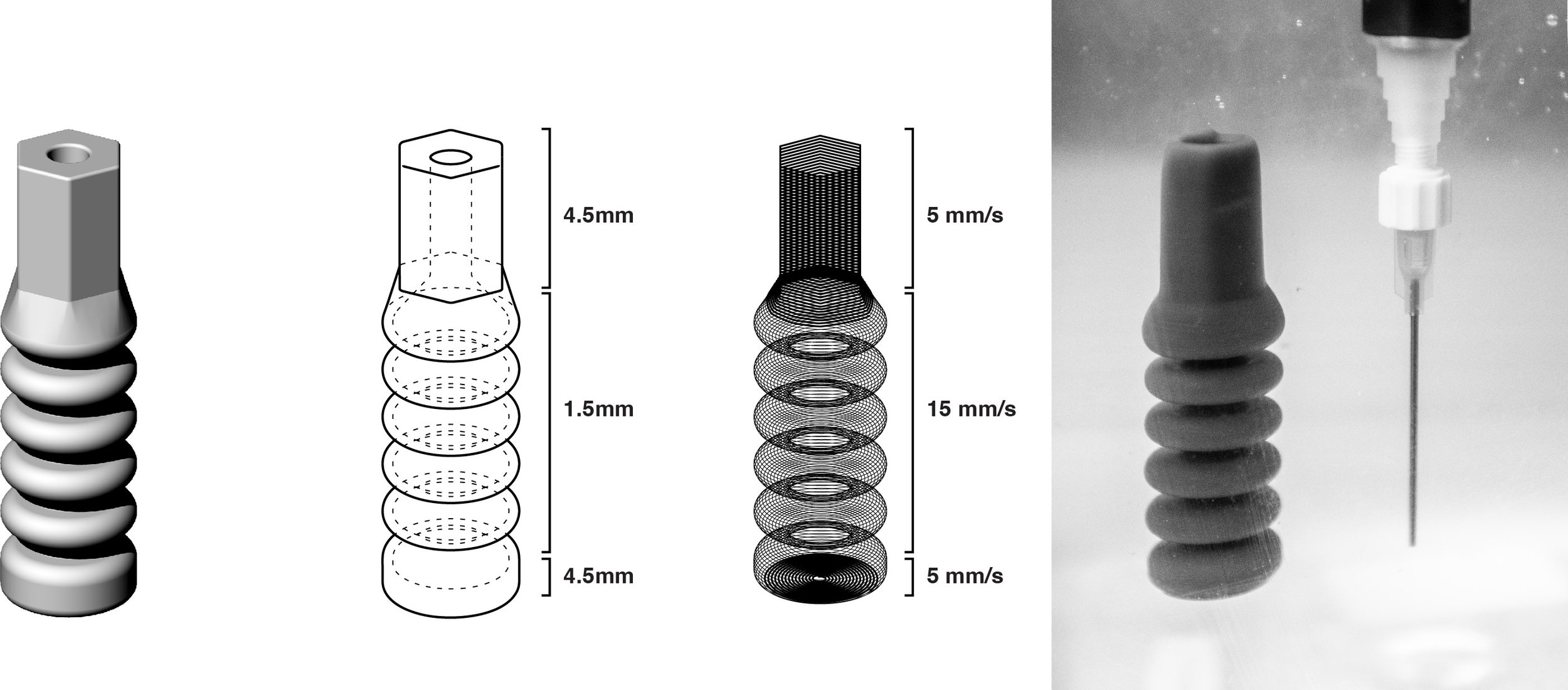
We aimed to show how increasing the printing volume (20x larger than the next commercial competitor) and the printing speed could revolutionize soft robotic fabrication, which mainly uses silicone molding. In the paper “Printed silicone actuators for soft robotics”, we demonstrated that RLP could outperform other elastomer printing methods. With this robotic arm, we showed that it was possible to print a whole actuator and gripper assembly in one-shot, including airways.
The arm was printed using the RLP platform and off-the-shelf Shore 30A silicone.