Tentapocalypse
A reflection on art and soft robotics
Soft robotics is a young field still exploring its purpose. At Robosoft 2024—one of the leading conferences on the subject—many keynote speakers posed the pressing questions: "How is this useful?" and "Where are we headed?"
Within robotics and academia, such questions are vital. They guide funding decisions and ensure the creation of innovations that serve a broad, practical purpose. However, in this project, I wanted to step away from the purely functional. Instead of asking what soft robotics should do, I asked: could it be art?
This installation features 91 silicone-molded tentacles or six different sizes, each embedded with a custom 3D-printed “egg” containing a vibration motor and a tip-mounted LED. At each tentacle’s base lies a custom PCB—designed by John Welsh, my co-creator—which not only powers vibration motors but also supports 40 additional LEDs to illuminate the entire structure. During the molding process, the egg was secured inside the tentacle mold, ensuring it stayed precisely in place as the silicone cured.
Every aspect of this design was carefully planned and rendered in CAD, then optimized for both functionality and manufacturability. To the right, you can see the multiple design iterations of the tentacles and the egg. Given that silicone casting is labor-intensive and that each mold must be 3D-printed, we conducted finite element analyses first—assessing variables like length, base radius, curvature, and added weight at the tip—to guide our decisions and reduce costly trial and error.
The egg itself evolved through five main iterations. We aimed to create the strongest possible vibration while keeping the form slender enough to be placed higher within the tentacle for better motion control. Along the way, we streamlined the egg assembly from three pieces down to two, making it both easier to produce in larger quantities—around a hundred units—and ensuring it remained airtight during curing. This careful refinement led us to a design that meets our functional requirements while supporting our artistic goals.


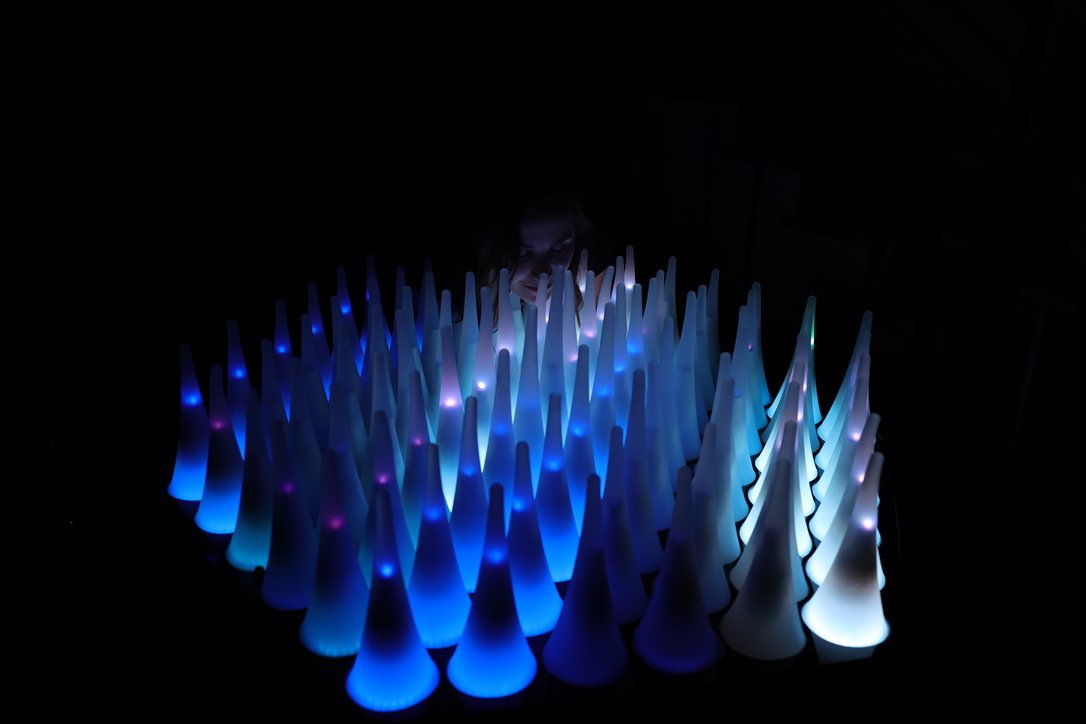
The installation was designed to create a truly multi-sensory encounter with soft robotics. It is designed to be reactive to sound or music. Positioned low to the ground, it offers distinct perspectives—one when viewed from above and another at eye level. Visitors are invited to sit around it, engaging physically by running their hands, arms, or even faces through the flexible tentacles. When we unveiled it at a private ~2000 person immersive art event, we saw an incredible variety of responses: from people assigning names and personalities to individual tentacles, to treating the piece as a gathering space, or even fully immersing their upper bodies in the soft, responsive environment.